How to Demarcate and Visualize a Scale-Free Home Range?

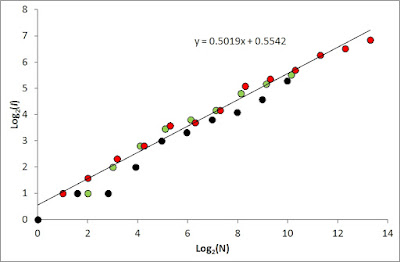
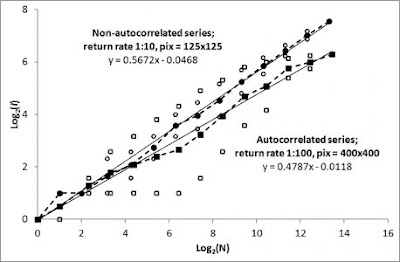
The default method to visualize a home range in the MRW Simulator is to just present the spatial scatter of fixes, without a traditional area demarcation. The scatter then represents a statistical fractal with properties to be explored by various methods. However, some kind of area demarcation has at least a visual appeal and may also be a necessity for some analytical purposes despite its intrinsic sample size dependency. Here I present a home range portrait that is based on an objective criterion from the MRW theory, the Characteristic scale of space use (CSSU). Using the CSSU scale [the unit spatial resolution when interpolating A(N, I ) to (1,1); i.e., “area per square root of N”] and superimposing a square of this size onto each fix in the series of N fixes is in my view a feasible choice. This alternative presentation of a home range outline should be applied after CSSU has been properly estimated using the A(N) regression method (for example, see this post). The text field “pi...